Having issues with Kulicke & Soffa K&S Assembleon H-Drive manipulator? Read our step-by-step SMT maintenance solution below. If you require replacement feeders, nozzles, or sensors, contact SMTBOX for OEM-compatible parts.
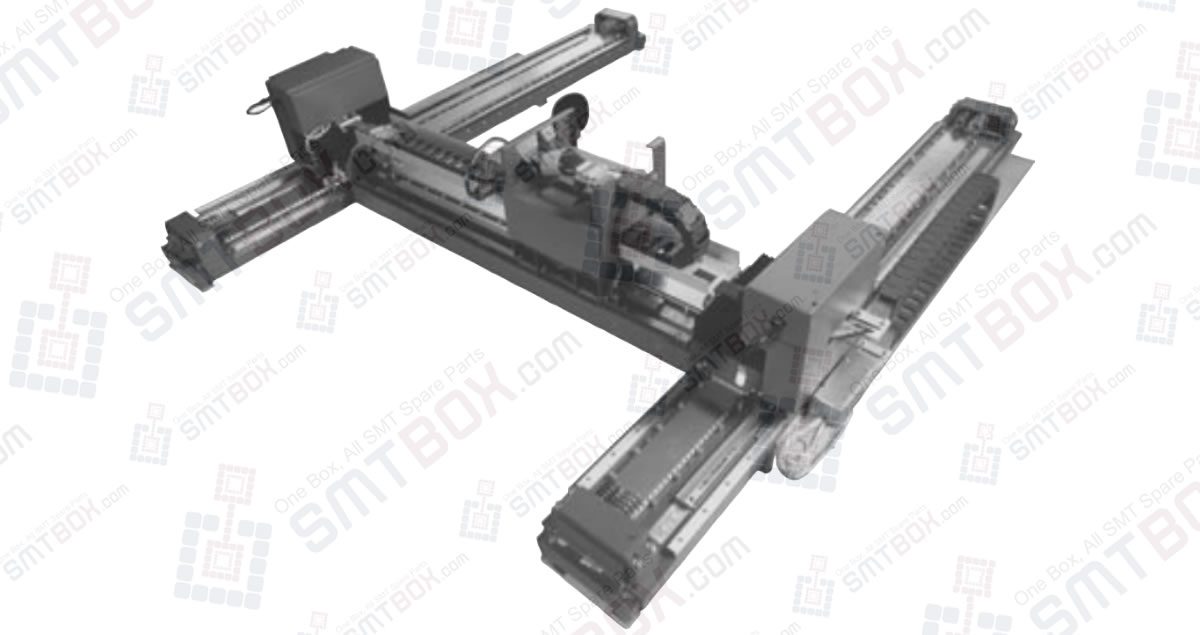
The H-Drive manipulator is a self-calibrating Cartesian robot with linear motors and encoders. The manipulator has two Y-axes and one X-axis, each with their own integrated controller and power stages. Special attention is given to the dynamic behaviour of the manipulator which is of great importance for the performance. Settling times are defined as the period between the end of the setpoint profile and the moment that the manipulator actually reaches the required position. If the position window is chosen smaller (e.g. for fine pitch components, requiring higher accuracy) the settling time will be longer. For the H-Drive manipulator, a cubic setpoint profile will be used. In a cubic setpoint profile the acceleration gradually increases and decreases as function of time. The X-slide of the manipulator has, on the front side, an interface which is configured with 2 placement heads and 1 digital fiducial camera.
Resolution X and Y motor: 1 micron
Acceleration X motor: 17 m/s2
Acceleration Y motors: 12 m/s2
Velocity X motor: 1.4 m/s
Velocity Y motors: 1.4 m/s
Max. stroke X motor: 660mm
Max. stroke Y motors: 1140mm
Our editorial team consists of senior SREs, mechanical engineers, and SMT assembly specialists with over 15 years of industry experience in PCB assembly line optimization. All technical articles are reviewed and verified for mechanical and electronic compatibility before publication.