Having issues with 5. Placement Head of Kulicke and Soffa Assembleon AX-301 AX-501 SMT Pick & Place System? Read our step-by-step SMT maintenance solution below. If you require replacement feeders, nozzles, or sensors, contact SMTBOX for OEM-compatible parts.
For the CPR only one placement head is available (PH-LV) while the SPR and TPR can be equipped with two different placement heads (PH-LV, PH-SV).
The placement heads execute the following tasks:
Align component
Pick and place components
Z-Movement
Rz Movement
Force sensing control
Board and component thickness variation correction
Component presence check
Board alignment
The placement heads are supported by the following robots:
PH-LV: CPR, SPR, TPR
PH-SV: SPR, TPR
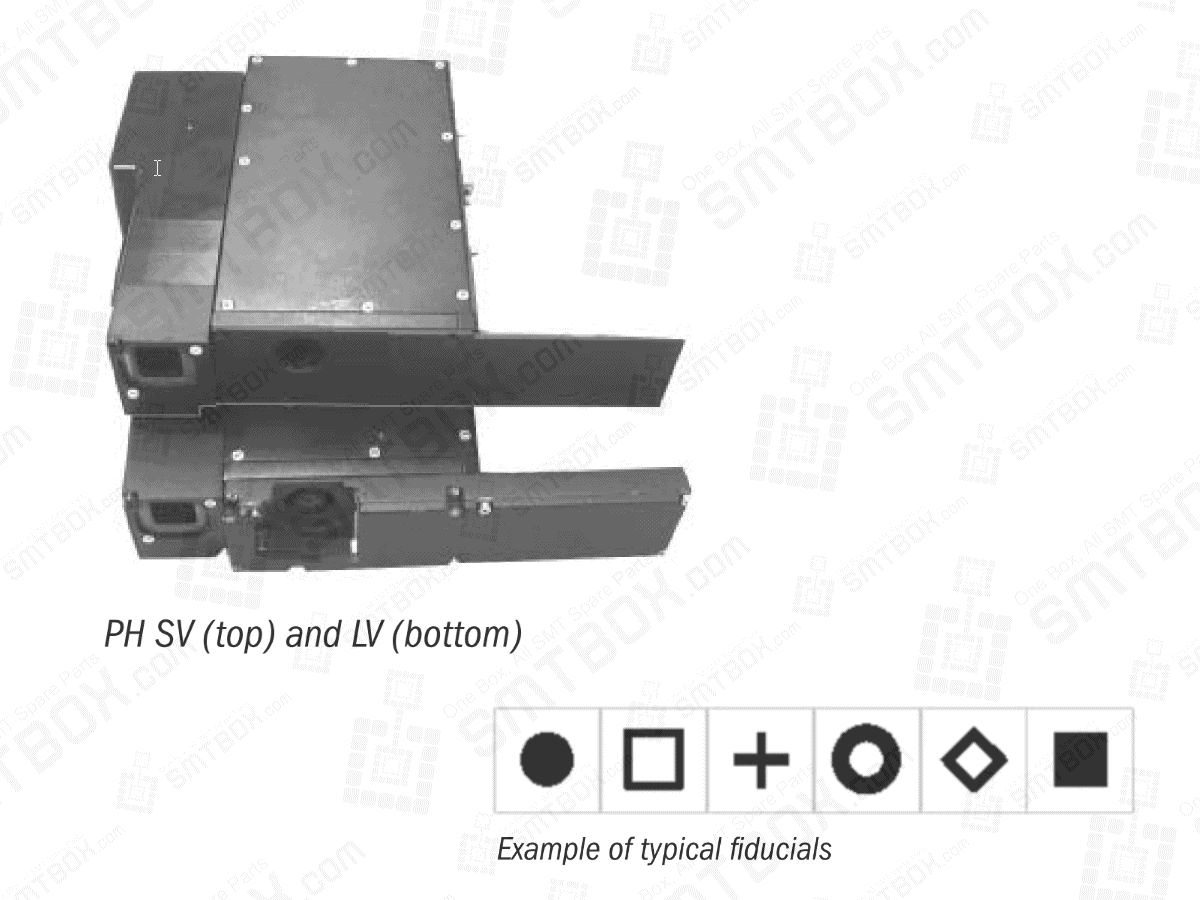
PH SV (top) and LV (bottom):
5.1 Placement Head Laser Vision (PH-LV)
A compact placement robot can only be equipped with a PH-LV and can perform laser alignment only. A standard, compact and twin placement robot can be equipped with a PH-LV and can perform both laser and camera alignment.
PH-LV specifications:
Closed loop placement force feedback: Programmable between 1.5 ~ 8N in steps of 0.1N*(Dependent on nozzle type)
Component pick orientation: 0°, 90°, 180°, 270°, 360°
Maximum component weight: <12gr
Maximum component dimensions: 17.5 x 17.5 x 10.5mm
Laser alignment (LxWxH): 24 x 24 x 6.3mm (component size ≤ 24 x 24mm)
Camera alignment (LxWxH): 45 x 45 x 4.3mm (component size > 24 x 24mm)
Minimum component thickness: 0.12mm
5.2 Placement Head Single Vision (PH-SV)
A standard placement robot and twin placement robot can be equipped with a PH-SV and perform camera alignment only.
PH-SV specification
Closed loop placement force feedback: Programmable between 1.5 ~ 8N in steps of 0.1N(Dependent on nozzle type)
Component pick orientations: 0°, 90°, 180°, 270°, 360°
Maximum component weight: < 12 gr
Maximum component dimensions:
Camera alignment (LxWxH): 45 x 45 x 10.5mm 5.3 Board alignment camera
Board align camera’s are mounted at the front side of each placement head. Besides the main purpose of board alignment, the downward looking camera has a multiple of additional functions:
Badmark sensing
Feeder trolley position detection
Toolbit exchange unit location detection and toolbit presence check
Dump bin location detection
Alignment camera location detection
Diagnostics or teaching viewing purposes with live image on GUI
Snapshot camera of feeder position pickup location for fault tracing (default set off)
Board alignment camera
Camera field of view: 8.6 x 6.8mm
Camera pixels: 1024 x 768
Camera pixel resolution: 8.4 μm
Illumination: Bright fi eld & dark field
Fiducial types: All regular types with a contrast level of > 30%
Fiducial shape size: Fiducial shape size > 0.3mm, < 3.0mm (smaller on request)
Free zone around fiducial: No features allowed within 0.1mm, no look-a-likes within 2.6mm from fiducial
Maximum number of fi ducials: 2048
Our editorial team consists of senior SREs, mechanical engineers, and SMT assembly specialists with over 15 years of industry experience in PCB assembly line optimization. All technical articles are reviewed and verified for mechanical and electronic compatibility before publication.